摘要
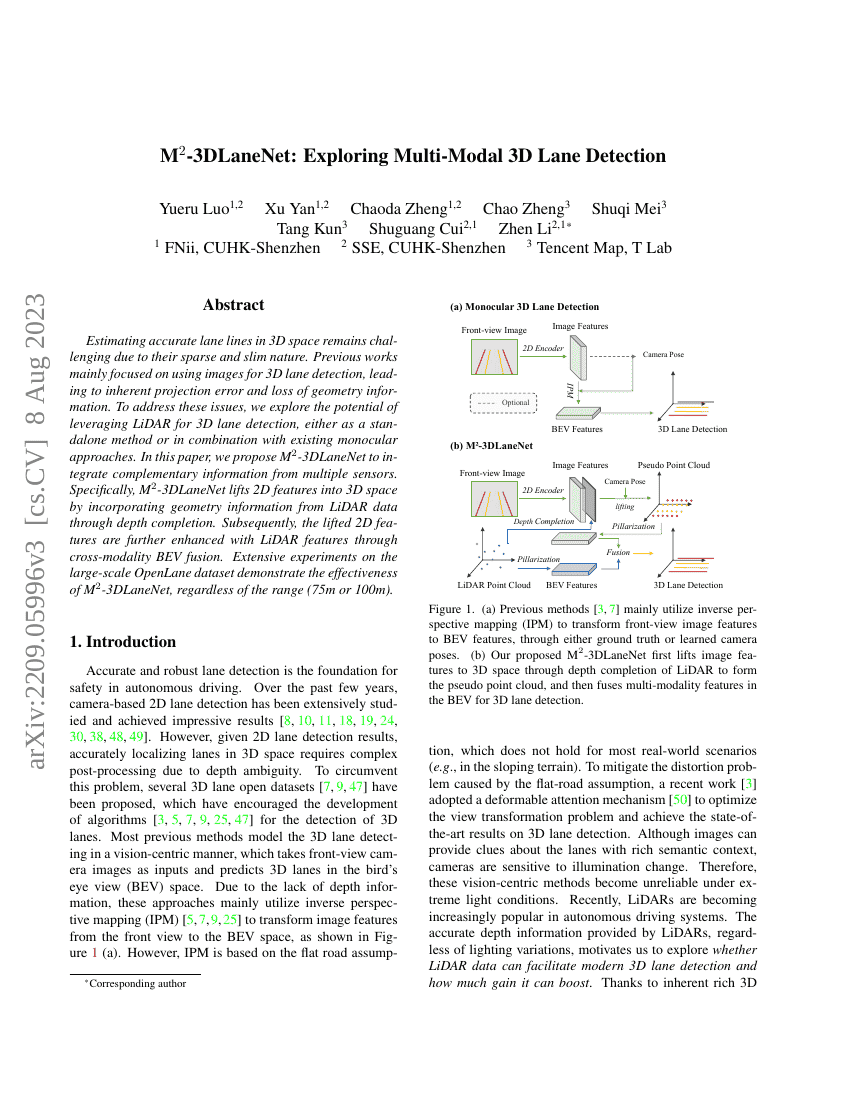
在三维空间中准确估计车道线仍然具有挑战性,主要是由于其稀疏和细长的特性。以往的研究主要集中在利用图像进行三维车道检测,这导致了固有的投影误差和几何信息的丢失。为了解决这些问题,我们探讨了利用激光雷达(LiDAR)进行三维车道检测的潜力,无论是作为独立方法还是与现有的单目方法结合使用。本文提出了一种名为M$^2$-3DLaneNet的方法,旨在整合来自多个传感器的互补信息。具体而言,M$^2$-3DLaneNet通过深度补全将二维特征提升到三维空间,从而融入激光雷达数据中的几何信息。随后,通过跨模态鸟瞰图(BEV)融合进一步增强这些提升后的二维特征与激光雷达特征。在大规模OpenLane数据集上的广泛实验表明,无论是在75米还是100米范围内,M$^2$-3DLaneNet均表现出有效性。
基准测试
| 基准 | 方法 | 指标 |
|---|---|---|
| 3d-lane-detection-on-openlane | M^2-3DLaneNet (Camera + Lidar) | Curve: 60.7 Extreme Weather: 56.2 F1 (all): 55.5 FPS (pytorch): - Intersection: 43.8 Merge u0026 Split: 51.4 Night: 51.6 Up u0026 Down: 53.4 |