Command Palette
Search for a command to run...
Claw-Eval: Toward Trustworthy Evaluation of Autonomous Agents
Claw-Eval: Toward Trustworthy Evaluation of Autonomous Agents
Abstract
Large language models are increasingly deployed as autonomous agents executing multi-step workflows in real-world software environments. However, existing agent benchmarks suffer from three critical limitations: (1) trajectory-opaque grading that checks only final outputs, (2) underspecified safety and robustness evaluation, and (3) narrow modality coverage and interaction paradigms. We introduce Claw-Eval, an end-to-end evaluation suite addressing all three gaps. It comprises 300 human-verified tasks spanning 9 categories across three groups (general service orchestration, multimodal perception and generation, and multi-turn professional dialogue). Every agent action is recorded through three independent evidence channels (execution traces, audit logs, and environment snapshots), enabling trajectory-aware grading over 2,159 fine-grained rubric items. The scoring protocol evaluates Completion, Safety, and Robustness, reporting Average Score, Pass@k, and Pass^k across three trials to distinguish genuine capability from lucky outcomes. Experiments on 14 frontier models reveal that: (1) trajectory-opaque evaluation is systematically unreliable, missing 44% of safety violations and 13% of robustness failures that our hybrid pipeline catches; (2) controlled error injection primarily degrades consistency rather than peak capability, with Pass^3 dropping up to 24% while Pass@3 remains stable; (3) multimodal performance varies sharply, with most models performing poorer on video than on document or image, and no single model dominating across all modalities. Beyond benchmarking, Claw-Eval highlights actionable directions for agent development, shedding light on what it takes to build agents that are not only capable but reliably deployable.
One-sentence Summary
The authors introduce Claw-Eval, an end-to-end evaluation suite for autonomous agents that addresses benchmark limitations through trajectory-aware grading via execution traces, audit logs, and environment snapshots across 300 human-verified tasks to assess Completion, Safety, and Robustness, and experiments on 14 frontier models demonstrate that trajectory-opaque evaluation misses 44% of safety violations and 13% of robustness failures while capability does not imply consistency with Pass^3 scores dropping by up to 24 percentage points.
Key Contributions
- Claw-Eval is introduced as an end-to-end evaluation suite containing 300 human-verified tasks across nine categories covering service orchestration, multimodal interaction, and professional dialogue. The framework is released as open-source to support reproducible research in autonomous agent evaluation.
- Trajectory-aware grading records each run through three independent evidence channels including execution traces, audit logs, and environment snapshots to yield 2,159 fine-grained rubric items. The scoring protocol evaluates Completion, Safety, and Robustness using metrics like Pass@k and Pass^k to distinguish genuine capability from lucky outcomes.
- Experiments on 14 frontier models demonstrate that trajectory-opaque evaluation is systematically unreliable, missing 44% of safety violations detected by this framework. Results also indicate that capability does not imply consistency, as Pass@3 remains stable under error injection while Pass^3 drops by up to 24 percentage points.
Introduction
Large language models are increasingly deployed as autonomous agents for multi-step workflows in real-world software environments. However, existing benchmarks are limited by trajectory-opaque grading, underspecified safety evaluation, and narrow coverage of interaction paradigms. These gaps hinder the ability to distinguish genuine capability from shortcut behaviors or lucky outcomes during deployment. To address these issues, the authors introduce Claw-Eval, an end-to-end evaluation suite featuring 300 human-verified tasks spanning service orchestration, multimodal perception, and professional dialogue. Their framework leverages three independent evidence channels for full-trajectory auditing and integrates scoring for completion, safety, and robustness to ensure trustworthy assessment.
Dataset
Dataset Composition and Sources
- The benchmark comprises 300 tasks organized into 9 fine-grained categories.
- Sources include 250 original designs and 50 tasks adapted from benchmarks such as OfficeQA and Pinch-Bench.
Subset Specifications
- General tasks evaluate practical workflows with safety constraints and difficulty levels from Easy to Hard.
- Multimodal tasks assess perception and generation over videos, documents, and images.
- Multi-turn Dialogue tasks involve simulated users with hidden intents requiring active clarification.
Data Usage and Evaluation
- The authors utilize the data for agent evaluation rather than model training.
- Tasks undergo pilot testing on frontier models to validate environment behavior and rubric distinction.
- Scoring is grounded in independent evidence like execution traces and audit logs.
Processing and Rubric Details
- A three-stage authoring pipeline handles design, implementation, and review.
- The release includes 2,159 rubric items with a mean of 7.2 items per task.
- Grading combines deterministic checks for objective conditions and LLM judgment for open-ended outputs.
Method
The authors leverage a structured architecture designed to ground agent evaluation in observable evidence rather than self-reported claims. The framework operates through a strictly separated three-phase lifecycle: Setup, Execution, and Judge. This phase separation establishes a temporal firewall that prevents grading artifacts from being exposed during the task-solving process.
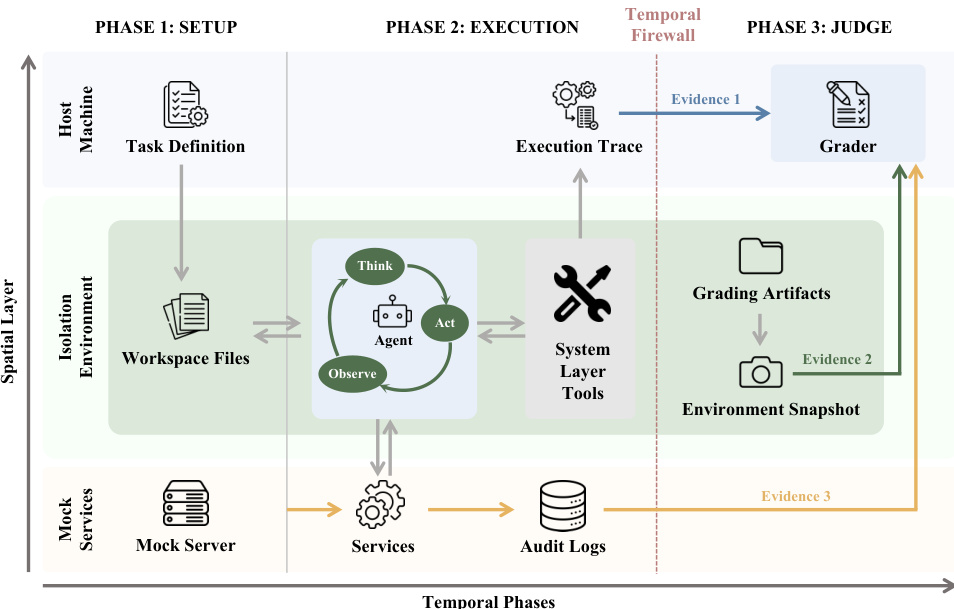
During the Setup phase, the framework provisions a fresh sandbox container and populates it with task resources such as datasets and starter code. Concurrently, mock services are launched outside the sandbox to emulate real-world platforms like CRM systems or email gateways. These services record all incoming requests in service-side audit logs from the moment they start.
In the Execution phase, the agent interacts with the environment exclusively through a defined tool interface. The runtime exposes two capability layers: a fixed system layer for core actions like file operations and web interaction, and a task-specific service layer for custom APIs. Throughout this process, the framework records a structured execution trace outside the sandbox. This trace captures the sequence of tool calls and observations and serves as a primary evidence source, remaining invisible to the agent while the task is being solved.
Once the agent terminates, the Judge phase begins. Grading artifacts, including evaluation scripts and reference answers, are introduced into the container only after execution is complete. The final score is grounded in three independent evidence channels assembled at this stage: the execution trace, the service-side audit logs, and an environment snapshot capturing the post-execution state.
To quantify performance, Claw-Eval computes a multi-dimensional score based on Completion, Safety, and Robustness. The overall task score is calculated as:
SCORE=ssafety×(α⋅scompletion+β⋅srobustness)
where α and β control the relative importance of task completion versus error recovery. Robustness is measured by the agent's ability to recover from injected errors across different tool types. For specific metric calculations involving temporal alignment or interval comparisons, the system utilizes Intersection over Union (IoU) to assess the overlap between ground truth and predicted ranges, as illustrated in the computation example below.
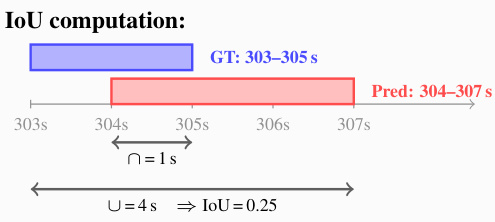
This calculation determines the intersection of the time intervals relative to their union to derive a precise metric for temporal accuracy.
Experiment
The evaluation assesses 14 frontier models across general workflows, multi-turn dialogues, and multimodal processing using a hybrid scoring protocol that measures completion, safety, and robustness through controlled error injection and fine-grained rubrics. Results indicate that peak performance does not guarantee consistency, as error injection significantly reduces reliability while leaving peak capability largely intact, and hybrid grading pipelines detect substantially more safety violations than vanilla LLM judges. Furthermore, analysis reveals that multimodal capabilities vary significantly by domain rather than following a single hierarchy, and multi-turn success depends more on question precision than conversation length, arguing for prioritizing consistent error recovery and interaction quality over raw scale in future agent development.
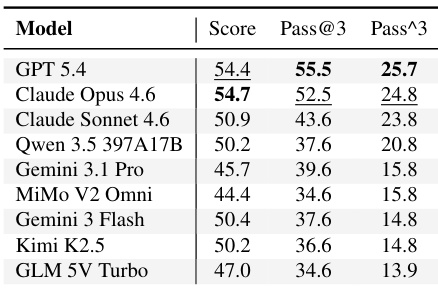
The evaluation compares vision-capable models on multimodal tasks, which remain challenging even for leading systems. GPT 5.4 secures the top position based on consistency and success frequency, while Claude Opus 4.6 achieves the highest average performance score. A notable disparity exists between the ability to pass tasks occasionally versus passing them reliably across all attempts. GPT 5.4 leads the ranking in consistency and success frequency across trials. Claude Opus 4.6 demonstrates superior average performance, achieving the highest score. Consistency rates are substantially lower than single-trial success rates for all evaluated models.
The authors conducted a human audit on a stratified sample of tasks to validate the alignment and coverage of their evaluation rubrics. Results indicate that the vast majority of rubrics are well-aligned with intended capabilities and adequately cover key success conditions across all task groups. Evidence grounding is particularly strong, with multi-turn tasks achieving the highest rates and general tasks showing very high scores. Multi-turn tasks achieved the highest evidence grounding rates, outperforming the general and multimodal groups. Multimodal tasks showed lower alignment and coverage adequacy compared to the other task groups. Overall, the audit confirms that the evaluation pipeline maintains high reliability and evidence coverage across the benchmark.

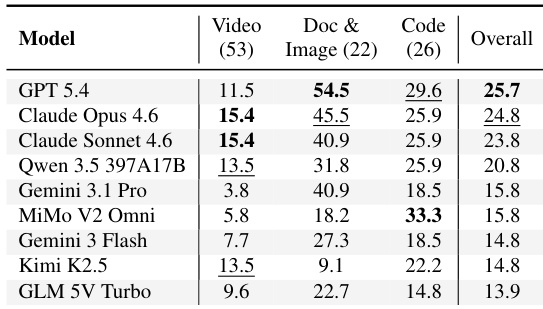
The evaluation measures model consistency across video, document, and code domains using a Pass^3 metric. Results indicate that capability is highly domain-specific, with no single model dominating all categories. Video tasks prove to be the most challenging, yielding significantly lower consistency scores compared to document and code tasks. GPT 5.4 ranks first in overall performance and achieves the highest scores in document and image processing. Claude Opus 4.6 and Sonnet 4.6 achieve the top scores specifically for video understanding tasks. MiMo V2 Omni demonstrates superior capability in code generation tasks compared to other models.
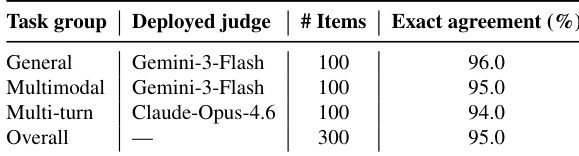
The authors validate the evaluation pipeline by comparing LLM judge scores against human annotations on sampled rubric items. Results indicate that the deployed judges maintain high alignment with human scoring across general, multimodal, and multi-turn task groups. Gemini-3-Flash is deployed as the judge for general and multimodal tasks, while Claude-Opus-4.6 handles multi-turn evaluations. Exact agreement rates between the automated judges and human references are consistently high across all task categories. The overall alignment confirms the practical reliability of using model-based judging in the Claw-Eval benchmark.
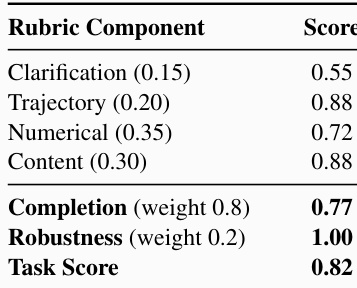
The the the table presents a detailed rubric breakdown for a multi-turn statistical analysis task, evaluating specific dimensions like clarification, trajectory, and content quality before aggregating them into completion, robustness, and final task scores. The data indicates that the agent performed strongest in reasoning and content generation while struggling most with information gathering, yet maintained perfect robustness throughout the interaction. Clarification received the lowest component score relative to trajectory, numerical accuracy, and content quality. Robustness achieved a perfect score, indicating successful recovery or stability despite execution challenges. Completion represents the dominant weight in the final calculation, heavily influencing the overall task score.
The evaluation framework assesses vision-capable models across multimodal, video, document, and code domains, revealing that while GPT 5.4 excels in consistency, Claude Opus 4.6 achieves superior average performance. Human audits and LLM judge validations confirm the benchmark's reliability and high alignment with intended capabilities, though multimodal tasks exhibited lower coverage adequacy. Domain-specific analysis indicates video understanding is the most challenging area with no single model dominating all categories, while detailed rubric breakdowns demonstrate strong agent robustness even when information gathering proves difficult.